HIỆU CHUẨN MÁY ĐO RUNG
QUY TRÌNH HIỆU CHUẨN MÁY ĐO RUNG
Ngày đăng: 20-03-2017
995 lượt xem
HIỆU CHUẨN MÁY ĐO RUNG
Miêu tả hiệu chuẩn máy đo rung
|
Đặc tính thiết bị |
thông số hiệu suất |
phương pháp kiểm tra |
|
International Research and Development Corp. Model 306 |
||
|
Độ chuyển vị |
Dải đo : 0 đến 0.1, 0 đến 1, 0 đến 10, và 0 đến 100 milli-inches đỉnh-đỉnh Dung sai: + 10% so với Tần số từ 10 đến 2000 Hz IRD Mechanalysis Inc. Model 306 |
Các chỉ dẫn TI được so sánh đúng Chỉ dẫn. tiêu chuẩn
|
|
Độ chuyển vị |
Dải đo : 0 đến 0.1, 0 đến 0.3, 0 đến 1, 0 đến 3, 0 đến 10, 0 đến 30, Và 0 đến 100 mili-inch Đỉnh-đỉnh hoặc 0 đến 3000 microns đỉnh-đỉnh Đến đỉnh điểm Dung sai: + 11% so với Tần số từ 12 đến 1000 Hz |
Các chỉ dẫn TI được so sánh đúng Chỉ dẫn. tiêu chuẩn
|
|
Tốc độ |
Dải đo : 0 đến 0.1, 0 đến 0.3, 0 đến 1, 0 đến 3, 0 đến 10, 0 đến 30, Và 0 đến 100 inch / giây Hoặc 0 đến 3000 mm / giây Dung sai: + 11% so với Tần số từ 12 đến 1000 Hz IRD Mechanalysis Inc. Model 309 |
Các chỉ dẫn TI được so sánh đúng Chỉ dẫn. tiêu chuẩn
|
|
Tốc độ |
Dải đo : 0 đến 0.1, 0 đến 0.3, 0 đến 1, 0 đến 3. 0 đến 10, 0 đến 30, Và 0 đến 100 inch / giây Hoặc 0 đến 3000 mm / giây Dung sai: + 11% so với Tần số từ 12 đến 1000 Hz IRD Mechanalysis Inc. Model 870 |
Các chỉ dẫn TI được so sánh đúng Chỉ dẫn. tiêu chuẩn
|
|
Độ chuyển vị |
Với bộ rung động 544: dải đo : 0 đến 1, 0 đến 2.5, 0 đến 5, 0 đến 10, 0 đến 25, và 0 đến 50 Mils đỉnh đến đỉnh điểm hoặc 0 đến 1000 Microns đỉnh đến đỉnh điểm Dung sai: + 11% so với Tần số từ 12 đến 1000 Hz |
Các chỉ dẫn TI được so sánh đúng Chỉ dẫn. tiêu chuẩn
|
|
Tốc độ |
với 970 gia tốc: Dải đo : 0 đến 0.1, 0 đến 0.25, 0 đến 0.5, 0 đến 1.0, 0 đến 2.5, và 0 đến 5,0 inch / giây hoặc 0 Đến 100 mm / giây Dung sai: + 8% so với Tần số từ 8 đến 2000 Hz |
Các chỉ dẫn TI được so sánh đúng Chỉ dẫn. tiêu chuẩn
|
Thiết bị hiệu chuẩn máy đo rung
- Máy gia tốc chuẩn thông số tối thiểu dải đo 10 đến 2000 Hz “G” dải đo: 0.5 đến 41.0 với báo cáo kết quả hiệu chuẩn như thiết bị hiệu chuẩn Kistler Instrument Co. 808 K1
- Bộ khuếch đại điện tích thông số tối thiểu Để khuyếch đại đầu ra của gia tốc độ không đảm bảo đo : +/- 5% như thiết bị Kistler Instrument Co. 561T
- Vôn kế true RMS dải đo 5 đến 450 mV độ không đảm bảo đo +/- 1% như Hewlett–Packard 3403C
- Thiết bị hiệu chuẩn rung dải đo 0.5 đến 41.0 G’s như thiết bị Unholtz–Dickie 330B
- Nguồn điện tích như ở mục 2.4 thiết bị hiệu chuẩn Unholtz–Dickie TA–100
- Máy dao động dải tần số 10 đến 2000 Hz, nguồn vào mục 2.5 như thiết bị Waveforms Inc. 401H–1/2R .
Quy trình hiệu chuẩn máy đo rung
4.1 Kiểm tra độ dịch chuyển
4.1.1 kiểm tra độ dịch chuyển model đầu tiên 306
4.1.1.1 kết nối thiết bị như hình 1
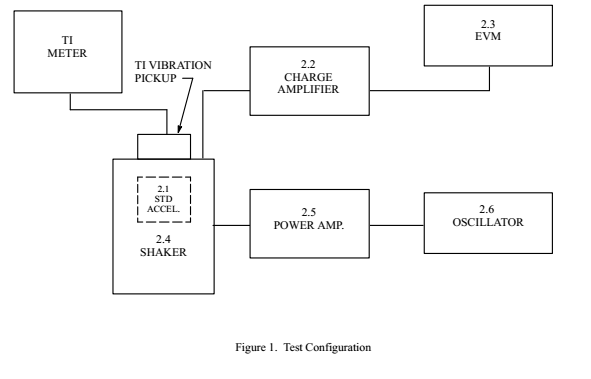
4.1.1.2 Gắn bộ tiếp nhận rung động TI vào phần chấn động rung bằng trục vít 1/4 "- 28 ở vị trí Thăm dò của TI .
4.1.1.3 Tại mỗi điểm hiệu chỉnh, ghi lại mức nhạy gia tốc chuẩn (mục 2.1) từ Báo cáo của Hiệu chỉnh trong cột 3 Bảng 1
4.1.1.4 Tại mỗi điểm hiệu chuẩn, nhân tốc độ "G" (cột 2) bằng máy gia tốc chuẩn Độ nhạy (cột 3) và ghi lại như là đầu ra gia tốc chuẩn mV (cột 4) của Bảng 1.
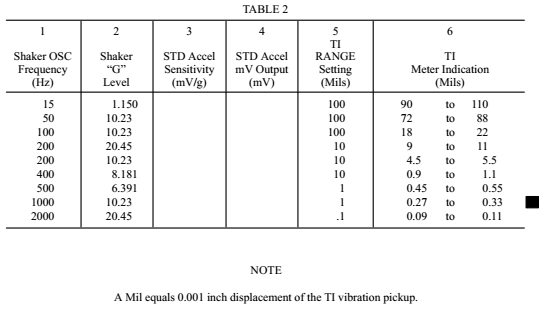
4.1.1.5 Điều chỉnh bộ điều khiển tần số dao động cho mỗi tần số liệt kê trong Bảng 2. Ở mỗi tần số, Thiết lập TI RANGE đến vị trí thích hợp và điều chỉnh điều khiển biên độ đầu ra oscillator để có được mV đầu ra Mong muốn (tính trong bước 4.1.1.4) trên EVM (mục 2.3).
4.1.1.6 Xác minh rằng các chỉ dẫn DISPLACEMENT METER nằm trong phạm vi dung sai ở mỗi điểm hiệu chuẩn.
4.1.1.7 Nếu không có các thử nghiệm khác được thực hiện trên mô hình ban đầu của TI, hãy đặt tất cả các công tắc nguồn để tắt hoặc chờ Và ngắt kết nối TI.
4.1.1.8 Trên mô hình ban đầu, TI kiểm tra lại pin TI bằng cách thiết lập công tắc chuyển sang CAL và Đảm bảo rằng chỉ thị TI có thể được điều chỉnh đến 1.0 với điều khiển BAL-CAL.
4.1.1.9 Nếu tất cả các phép thử đều đạt yêu cầu, gắn nhãn "SPECIAL CALIBRATION" vào đồng hồ đo và bộ nhận hàng Rằng chúng chỉ được sử dụng với các đơn vị liên quan mà chúng được hiệu chuẩn.
4.1.2 Mô hình gần đây 306 Kiểm tra Xung
4.1.2.1 Kết nối thiết bị như thể hiện trong hình 1.
4.1.2.2 Lắp bộ tiếp nhận rung động TI vào phần chấn động rung bằng trục vít 1/4 "-28 ở vị trí của TI Thăm dò.
4.1.2.3 Đảm bảo chuyển đổi SELECTOR được đặt thành DISP - MILS.
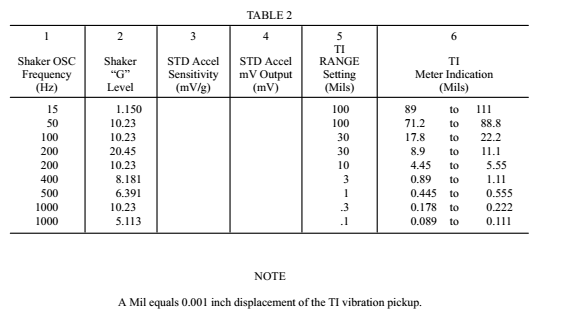
4.1.2.4 Tại mỗi điểm hiệu chuẩn, ghi lại mức nhạy cảm gia tốc chuẩn (mục 2.1) từ Báo cáo của Hiệu chuẩn trong cột 3 của Bảng 2.
CHÚ THÍCH
Accelerometer nhạy cảm ghi lại phải là mV / g rms. Để có được rms, nhân giá trị đỉnh bằng
0,707.
4.1.2.5 Tại mỗi điểm hiệu chuẩn, nhân tốc độ "G" (cột 2) bằng máy gia tốc tiêu chuẩn
Độ nhạy (cột 3) và ghi lại như là đầu ra gia tốc chuẩn mV (cột 4) của Bảng 2.
4.1.2.6 Điều chỉnh bộ điều khiển tần số dao động cho mỗi tần số liệt kê trong Bảng 3. Tại mỗi tần số, Thiết lập TI RANGE đến vị trí thích hợp và điều chỉnh điều khiển biên độ đầu ra oscillator để có được Mong muốn mV đầu ra (tính trong bước 4.1.2.5) trên EVM (mục 2.3).
4.1.2.7 Xác minh rằng các chỉ thị TI AMPLITUDE METER nằm trong phạm vi khoan dung tại mỗi điểm hiệu chuẩn.
XEM THÊM HIỆU CHUẨN MÁY ĐO RUNG TẠI ĐÂY
WEB: Caltek.com.vn
Công ty CP điện tử CALTEK chuyên cung cấp các dịch vụ về hiệu chuẩn, kiểm tra và sửa chữa các thiết bị điện tử, cơ khí, đo lường và dụng cụ máy móc thử nghiệm, cung cấp và tư vấn các thiết bị đo lường... trong nhiều lĩnh vực bao gồm điện, điện tử, hóa học, cơ khí, nhiệt độ, áp suất, thực phẩm, may mặc và môi trường.
Địa chỉ:
Trụ Sở: Tầng 3, Hà Nam Plaza, Quốc lộ 13, Phường Vĩnh Phú, TP. Thuận An, Tỉnh Bình Dương.
Chi Nhánh: Tầng 2, trung tâm điều hành KCN Tiên Sơn, Đường 11, KCN Tiên Sơn, Bắc Ninh.



Tin liên quan
- › ĐIỆN TRỞ ĐẤT
- › ĐO ĐIỆN TRỞ ĐẤT
- › HIỆU CHUẨN THREADED RING GAGES
- › HIỆU CHUẨN MÔMEN XOẮN TUA VÍT
- › HIỆU CHUẨN TORQUE TESTER
- › HIỆU CHUẨN WRIST STRAP TESTER
- › HIỆU CHUẨN BẰNG TAY TORQUE WRENCHES 6% ĐẾN 20%
- › HIỆU CHUẨN DIGITAL MULTIMETER 34401A
- › HIỆU CHUẨN POWER ANALYSER 2553
- › HIỆU CHUẨN MÁY ĐO NHIỆT ĐỘ
Bình luận (0)
ONLINE
-

Ms Huyền
Hotline / Zalo 0934466211


Gửi bình luận của bạn